











































































TOR Q UE
Page 30
Page 31
If you've noticed an error in this article please click here to report it so we can fix it.
TA I.
• Hi-tech electronics have been a feature of truck chassis for a few years now, controlling everything from injection timing to gear changing. But separate systems have never been able to talk to each other — until now.
Eaton, Lucas and Grau have teamed up to equip an ERF 17-tonner with a fuel-injection system, automated mechanical gearchange and anti-slip traction control (ASR) that work together to enhance performance, economy and safety.
After three years the project has reached the road-trial stage, with the electronics built into what looks like a standard ERF E6.
Its 135kW (180hp) Cummins B-Series engine and six-speed Eaton 4106 synchromesh gearbox are part of the standard E6 powertrain. But the ERF's standard Bosch VE fuel-injection pump has been replaced by a Lucas-CAV distributor pump embodying the EPIC technology previously used only on much smaller diesels.
TURBOCHARGED
EPIC was first developed for Peugeot diesel cars; it made its British (and direct-injection) debut last year on the 74kW (100hp) turbocharged version of the Ford Transit's 2.5D1 engine. The EPIC pump was adapted to suit the larger six-pot engine by Lucas Fuel Systems' engineers based at Gillingham, Kent.
Fuel metering is varied by moving the pump rotor to and fro axially; rotation of the camring in the pump's hydraulic head adjusts injection timing. Electronic control does away with the conventional mechanical (centrifugal) governor, so the number of moving parts in the pump is cut by half.
As with established electronically controlled systems such as Bosch's EDC design (christened EMR by Mercedes), fuel supply is not simply governed by the accelerator pedal; the electronics take account of emission limits. But the engine's torque characteristics are unaffected, so drivers should feel no difference in engine performance or response.
Eaton, for its part in the three-way interactive powertrain project, has applied its clutch-pedal-less AMT (automated mechanical transmission) technology for the first time to a synchromesh gearbox, in this case the E6's standard six-speed 4106 box.
Until now AMT and its non-clutchautomated counterpart SAMT have only been used with Eaton's constant-mesh Twin Splitter boxes.
As Eaton engineers readily admit, synchromesh makes the application of electronically controlled power-shifting less of a challenge, because synchronisation of input and output shaft speeds before they are brought into mesh is far less critical. The fact that the 4106 is a single-range box — compared with the Twin Splitter's three ranges — also simplifies the mechanical installation.
CRITICAL
When persuading the engine and gearbox electronics to react with each other, the most critical requirement was to ensure that gearshifts took place with minimum delay.
For an automated mechanical gearbox to match the performance of an Allison-type torque converter automatic transmission (which maintains uninterrupted drive to the wheels during ratio shifts), the disengagement of drive to the wheels during a shift must be as brief as possible. During an automatic shift on the test-bed ERF, the driver's control of the accelerator pedal is overidden. The driver skill needed to match input and output gearbox revs is effectively programmed into the interactive powertrain system's electronics, that up, and more particularly down, changes take place without undue delay, fuel wastage or over-revving.
Although electronic sensor and command signals pass along a wire at the speed of light, the transmission of information and its subsequent processing, in different computer languages, or "protocols", could result in unacceptably slow communication between engine and gearbox.
Fast data processing between the fuelling, gearshift and ABS/ASR systems on the ERF test-bed is ensured by the use of an electronic protocol which, ironically, was developed by Lucas's arch-rival, Bosch. The Intel-Bosch "Controller Area Network" (CAN) protocol is expected to be adopted as a European standard for vehicle-based computer systems. Faults in the data link can be diagnosed by workshop personnel using a personal computer-based instrument,
OPTIMUM
Because the demands of the three powertrain elements at any given time can conflict, a system of priorities is built into the CAN data link so that when it is calculating optimum fuel delivery, the rapid completion of a gearshift should take priority over both the road speed limiter and ASR functions, says Lucas's project engineer Simon Griffith.
Eaton's automated gearchange on the test-bed ERF is made easier than on earlier AMT installations by the electronic input from the EPIC electronic governor on the engine fuel injection pump. The relatively slow-acting electro-hydraulic throttle sender and throttle actuator have been eliminated: instead the essential AMT control over engine revs is achieved through the CAN data link between the fuel system and gearbox blackboxes.
Extensive tests on the electronic ERF have been undertaken, both unladen and fully loaded: traditionalists will be pleased to learn that the amount of cab nod was monitored, as an indication of system smoothness.
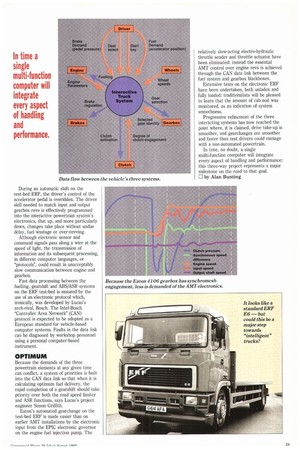
Progressive refinement of the three interacting systems has now reached the point where, it is claimed, drive take-up is smoother, and gearchanges are smoother and faster than test drivers could manage with a non-automated powertrain.
In time, no doubt, a single multi-function computer will integrate every aspect of handling and performance: this three-way project represents a major milestone on the road to that goal. 0 by Alan Bunting