































































































Saab-Scania guided vehicle system adopted by mining company
Page 14
If you've noticed an error in this article please click here to report it so we can fix it.
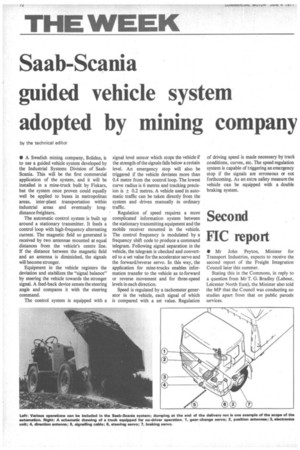
by the technical editor • A Swedish mining company, Boliden, is to use a guided vehicle system developed by the Industrial Systems Division of SaabScania. This will be the first commercial application of the system, and it will be installed in a mine-truck built by Fiskars, but the system once proven could equally well be applied to buses in metropolitan areas, inter-plant transportation within industrial areas and eventually longdistance freighters, The automatic control system is built up around a stationary transmitter. It feeds a control loop with high-frequency alternating current. The magnetic field so generated is received by two antennae mounted at equal distances from the vehicle's centre line. If the distance between the magnetic field and an antenna is diminished, the signals will become stronger.
Equipment in the vehicle registers the deviation and stabilizes the "signal balance" by steering the vehicle towards the stronger signal. A feed-back device senses the steering angle and compares it with the steering command.
The control system is equipped with a signal level sensor which stops the vehicle if the strength of the signals falls below a certain level. An emergency stop will also be triggered if the vehicle deviates more than 0.4 metre from the control loop. The lowest curve radius is 6 metres and tracking precision is + 0.2 metres. A vehicle used in automatic traffic can be taken directly from the system and driven manually in ordinary traffic.
Regulation of speed requires a more complicated information system between the stationary transmitting equipment and the mobile receiver mounted in the vehicle. The control frequency is modulated by a frequency shift code to produce a command telegram. Following signal separation in the vehicle, the telegram is checked and converted to a set value for the accelerator servo and the forward/reverse servo. In this way, the application for mine-trucks enables information transfer to the vehicle as to forward or reverse movement and for three-speed levels in each direction.
Speed is regulated by a tachometer generator in the vehicle, each signal of which is compared with a set value. Regulation of driving speed is made necessary by track conditions, curves, etc. The speed regulation system is capable of triggering an emergency stop if the signals are erroneous or not forthcoming. As an extra safety measure the vehicle can be equipped with a double braking system.